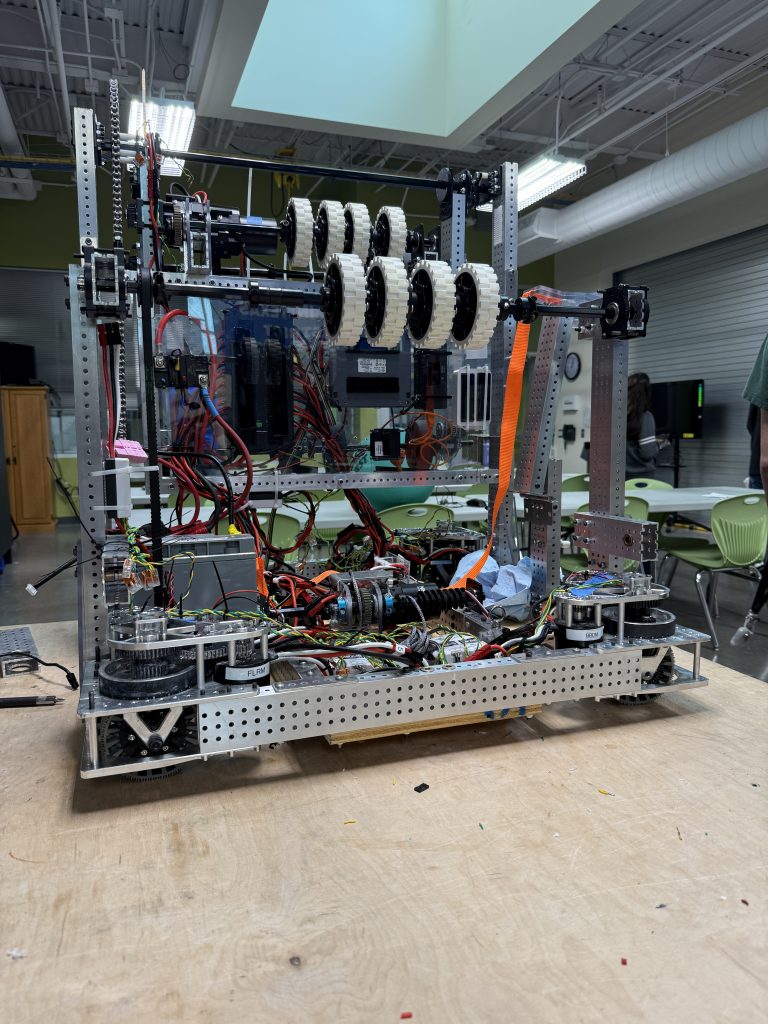
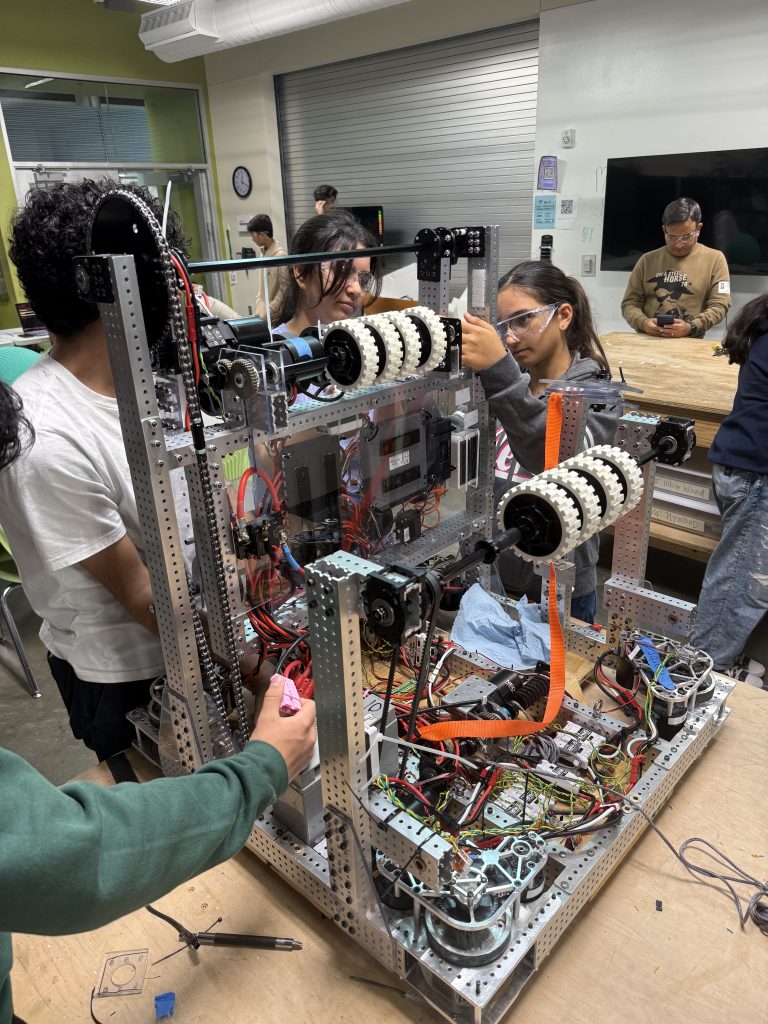
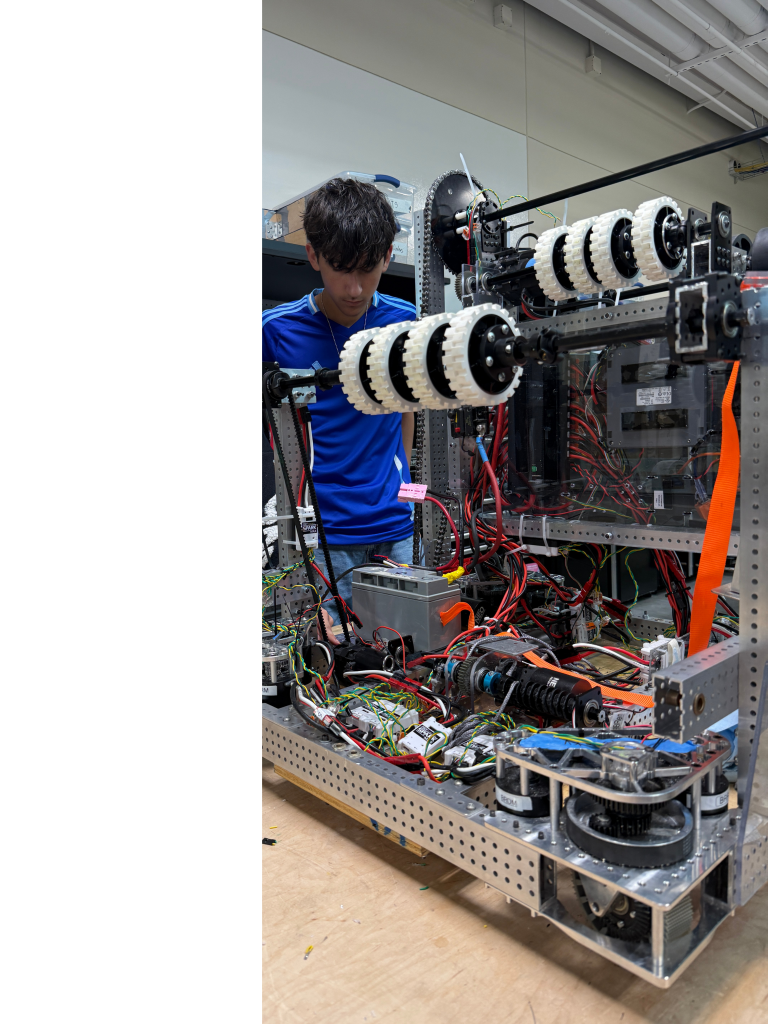
Hey warriors, welcome back to our weekly blog where we’re gearing up to bring you the latest and greatest in robotics! The electrical team has worked on organizing and labeling the various wires in the robot. So far they’ve labeled the CAN wires, power wires that connect to the NEO motors, and wires that run from the PDH to the SparkMAXES. They’ve also routed the wires to prevent any possible damages while the robot is in motion. The CAD team has been making minor but important adjustments to the robot, focusing on refining the shooter and climber subsystems. They’re also adjusting the motor attachment for those components on the robot design. They’ve been modifying the design to guarantee better performance and efficiency on the field. The mechanical team has been revising and adjusting subsystems like the intake and the shooter. After evaluating their designs, the team decided to make changes to improve both the performance and reliability. They’ve successfully implemented these modifications on the practice bot and are aiming to update the competition robot later this week. This week, the manufacturing team has made excellent progress by cutting out several major parts needed for the robot. They’ve experimented with new feed rates for our CNC machine trying out different bits. Unfortunately, the experiment didn’t go as planned, and they ended up breaking two bits. The team wasn’t discouraged by this set back and viewed it as “just a learning curve,” and have remained motivated to continue pushing through and complete this project (Atharva Narkhede). The programming team has been focusing on fixing issues with the overall drive, specifically adjusting the swerve drive code. They’ve discovered minor flaws and have been working hard to address bugs and refine the system. See you next week Warriors!